At some point, the improvement obtained by adding grid conductors becomes insignificant, in Figure 5, it is already apparent that not much improvement will be obtained by making the valleys shallower since the touch potential is already almost uniform throughout the grid area. In this case, if improvement is still required, the GPR itself must be lowered, for example, by increasing the size of the earthing system.
Step voltages within the substation area usually are not a problem if touch voltages are within safe limits. Not only are step voltages within the substation area smaller than touch voltages, but human beings also tolerate higher step voltages than touch voltages.
Step voltages are usually only a concern around the perimeter of the substation, where a steep earth surface potential gradient usually exists. As a rule of thumb, the steepness of the potential gradient is roughly inversely proportional to the size of the earthing system, step potentials are therefore liable to present a greater problem for small earthing systems than for larger ones. Increasing the size of the earthing system is an effective means of reducing step voltages.
Despite the touch voltages at the interior of the grid being reduced, the touch voltages on the edge of the substation are still very high. In order to protect personnel and equipment outside the substation, a buried grading ring (referred to as “perimeter conductors” in IEEE Std. 80) can be added 1 m beyond the main 20 m × 20 m earthing grid to reduce the touch voltages.
Figure 6 shows the touch and step voltages without grading ring. The maximum touch voltage is 767 V. Step voltages along the perimeter of the substation are also not acceptable.
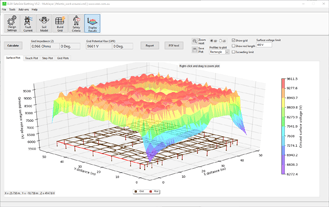
 3D view of example system")
 Surface voltages plot of example system")
 Touch voltages 2D plot of example system")
 Step voltages 2D plot of example system")


 Surface voltages 3D plot")
 Touch voltages 3D plot")
 Surface voltages 3D plot")
 Touch voltages 3D plot")
 Touch voltages 2D plot")
 Step voltages 2D plot")
 Touch voltages 2D plot")
 Step voltages 2D plot")
 Surface voltages 3D plot")
 Surface voltages 2D plot")
 Surface voltages 3D plot")
 Surface voltages 2D plot")