The ground grid for this comparison is the same as for Grid 3, except a separately-grounded fence is added, located 3 m outside the grid perimeter conductor, and with a fence perimeter ground conductor located 1 m outside the fence. The touch and step voltages were computed at similar location as for Grid 1. In this case, however, additional touch and step points were computed. For this case, touch voltages T1, T2, and T3 were computed as differences between the surface potentials at these points and the GPR of the main ground grid. T4 was computed as the difference between surface potential at the corner of the fence perimeter conductor and the GPR of the fence perimeter conductor (connected only to the separately-grounded fence). Step voltages S1 and S2 were computed as differences between earth surface potentials 1 m apart along the diagonal. S1 had the first point located over the corner of the perimeter conductor of the main grid, while S2 had the first point located over the outer (fence) perimeter conductor. The comparisons are shown in Table 6.
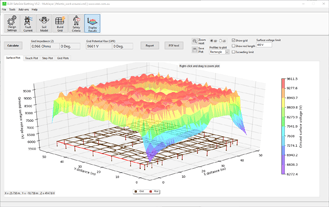
Insulated bonds between fence post and perimeter conductor are every 4 posts. Fence posts are connected with each other with insulated conductors in SafeGrid model. Touch voltages, step voltages, grid resistance and GPR are all calculated over the whole area with 1 m apart.